形状最適化について
形状最適化では、設計変数と目的関数を設定する必要があります。
設計変数とは最適化システムによる形状変更の対象であり、形状の長さや角度などを変数として表現します。設計変数は範囲を指定する必要があります。目的関数とは、最適化システムが設計変数の変更する際に目標となる設定です。
例えば「永久磁石の体積最小化」や「トルク最大化」などの条件を設定します。最適化において満たすべき特定の条件がある場合は、設計変数や応答値から条件式を作成し制限をかけます。この制限を制約条件と呼びます。最適化システムは設計変数を制約条件の範囲内で変更します。設計変数の変更を行ったことで目的関数の目標に向かっているか判定をおこない、次の設計変数変更の方針を決定します。この動作を繰り返し行うことで形状が最適化されます。
形状最適化の設定手順
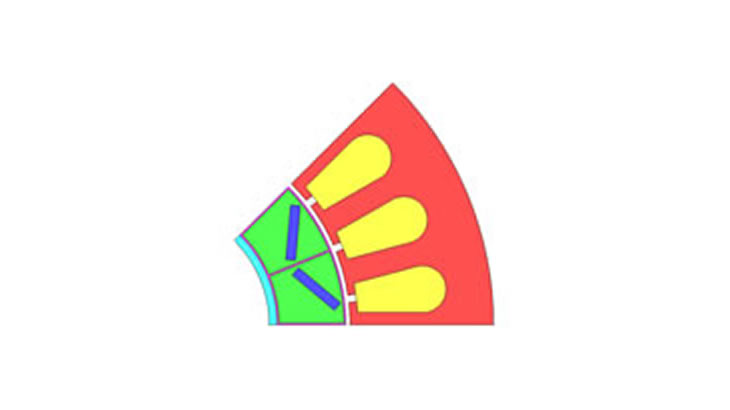
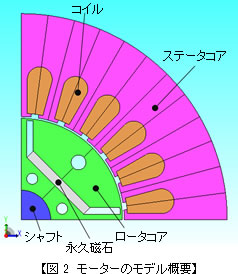
今回実行する形状最適化において、図3のようにモータは1/4対称(反周期境界)、断面形状でモデル化をしています。モデルは「シャフト」、「ロータコア」、「ステータコア」、「コイル」、「永久磁石」で構成されています。シャフト、永久磁石、ロータコアをZ軸周りに回転させトルクを求めます。
上述の解析条件から形状最適化を図3の手順で実施します。
設計変数と制約条件の設定
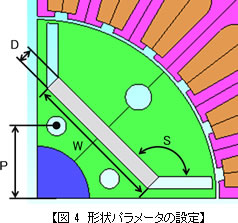
永久磁石の厚さD、永久磁石の幅W、空気領域の位置P、 空気領域と永久磁石の角度Sを設計変数として設定します。部品同士が干渉しないように制約条件を設定します。
目的関数の設定
- 最適化の目的関数を設定するために初期ケースの解析を実行します。
- トルクの時刻歴を出力し、その平均を応答値として目的関数に使用します。
- 磁石の体積に関しても、応答値として目的関数に使用します。
- 2つの目的関数を「平均トルク最大化」、「永久磁石の体積最小化」に設定します。
- 2つの目的関数はトレードオフの関係になっているため、多目的最適化を行うことになります。
- 多目的最適化を行う際には、最適化エンジンに多目的遺伝的アルゴリズムを使用します。

● 形状最適化結果
形状最適化結果として平均トルクVS磁石の体積のグラフを図6に示します。 磁石の体積が小さく、平均トルクが大きい解ほど最適化されています。 よって水色の点線上のプロットが最適化ケースとなります。
最適化ケースの中から代表して以下の3つのケースを表1に示します。
①大幅に磁石の使用量を削減しているケース
②平均トルクを維持しつつ磁石の使用量を削減しているケース
③磁石の使用量を維持しつつ平均トルクを向上しているケース