解析内容
.誘導モータは永久磁石を使用しないため製造コストが低く、AC電源を供給することで安定した動作が可能なため広く使われているモータのひとつです。
今回の事例では、4極かご形3相誘導電動機の2次元磁界解析を実施します。出力項目は以下の通りです。
- 拘束試験のVI特性
- 無負荷試験のNI特性
- すべり―トルク特性、すべり―効率特性
解析モデル
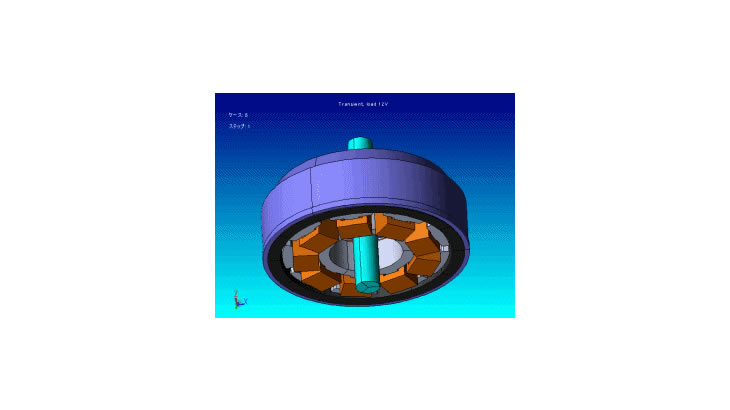
.4極かご形3相誘導電動機のモデル概要図を図1に示します。ロータ導体部の3D形状を図2に示します。エンドリングは回路素子として抵抗値のみモデル化します。
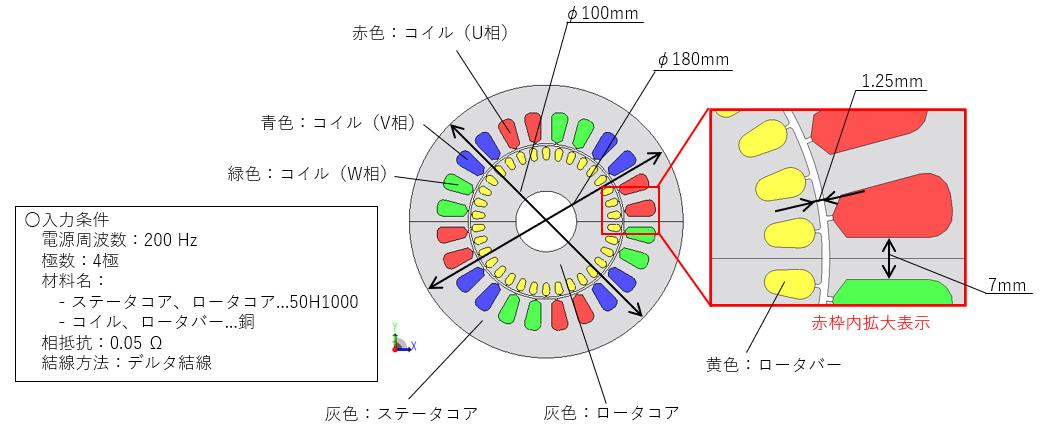 図1:モデル概要図
図1:モデル概要図
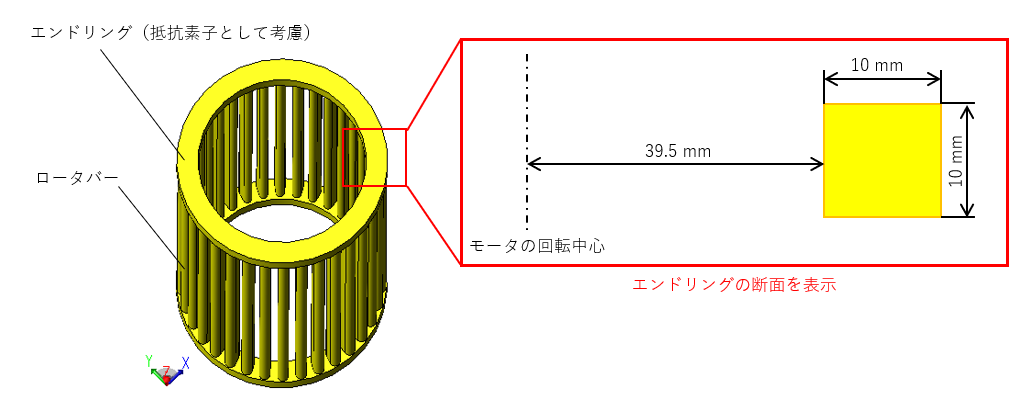
図2:ロータ導体部の3D形状
解析結果
〇拘束試験
.拘束試験はロータを回転させない状態(すべり=1)で電圧を印加し、相電流(線電流)や入力電力を測定する試験です。ロータが回転しないため機械出力は発生せず、入力電力は主に銅損として消費されます。この試験では、固定子および回転子の抵抗成分や漏れリアクタンスを含む電気特性を確認できます。
.拘束試験の解析パラメータを表1に、拘束試験におけるVI特性を図3に示します。VI特性のグラフの傾きからインピーダンスが求まります。図3のグラフの範囲では傾きが一定であり、コアが磁気飽和していないことが分かります。
表1:拘束試験の解析パラメータ
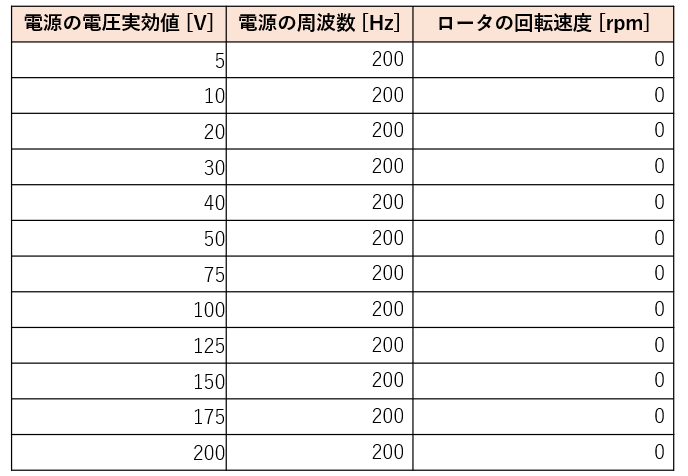
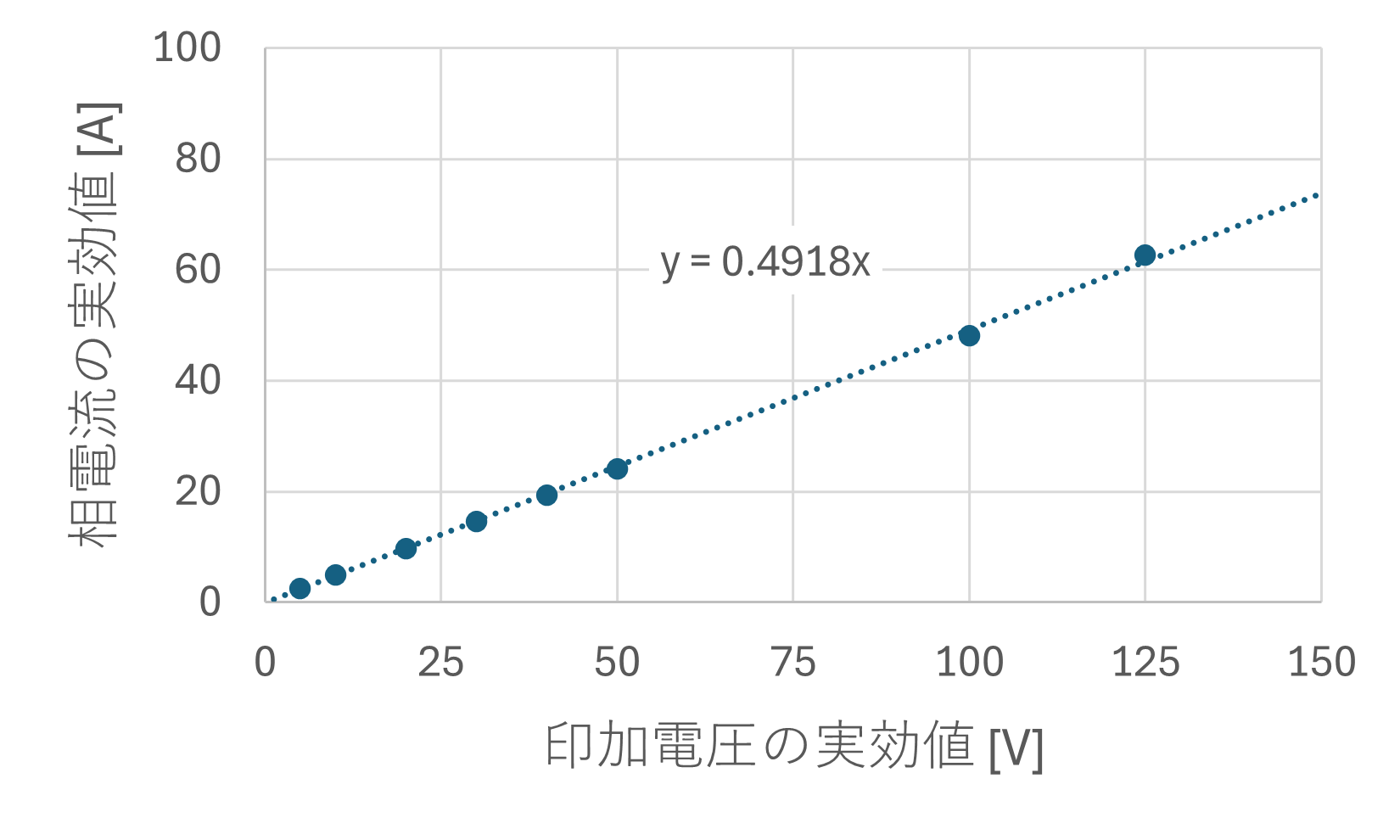
図3:拘束試験のVI特性
〇無負荷試験
.無負荷試験はモータを無負荷で回転させた状態(すべり=0)で電圧を印加し、相電流(線電流)や入力電力を測定する試験です。ロータの回転数と回転磁界が完全に同期しており、理想的にはロータ内の磁束の時間変化は生じずロータ導体部に電流が流れません。この試験では、磁束を発生させるために流れる励磁電流の大きさやその回転数依存性を確認することができます。
.無負荷試験の解析パラメータを表2に、無負荷試験におけるNI特性を図3に示します。「磁束∝印加電圧/電源周波数」が成り立つため、「印加電圧/電源周波数」が一定の場合は、励磁電流の大きさも一定になります。
表2:無負荷試験の解析パラメータ
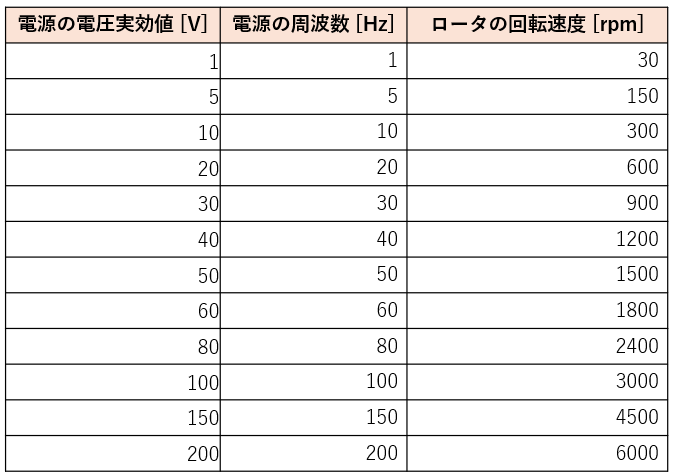
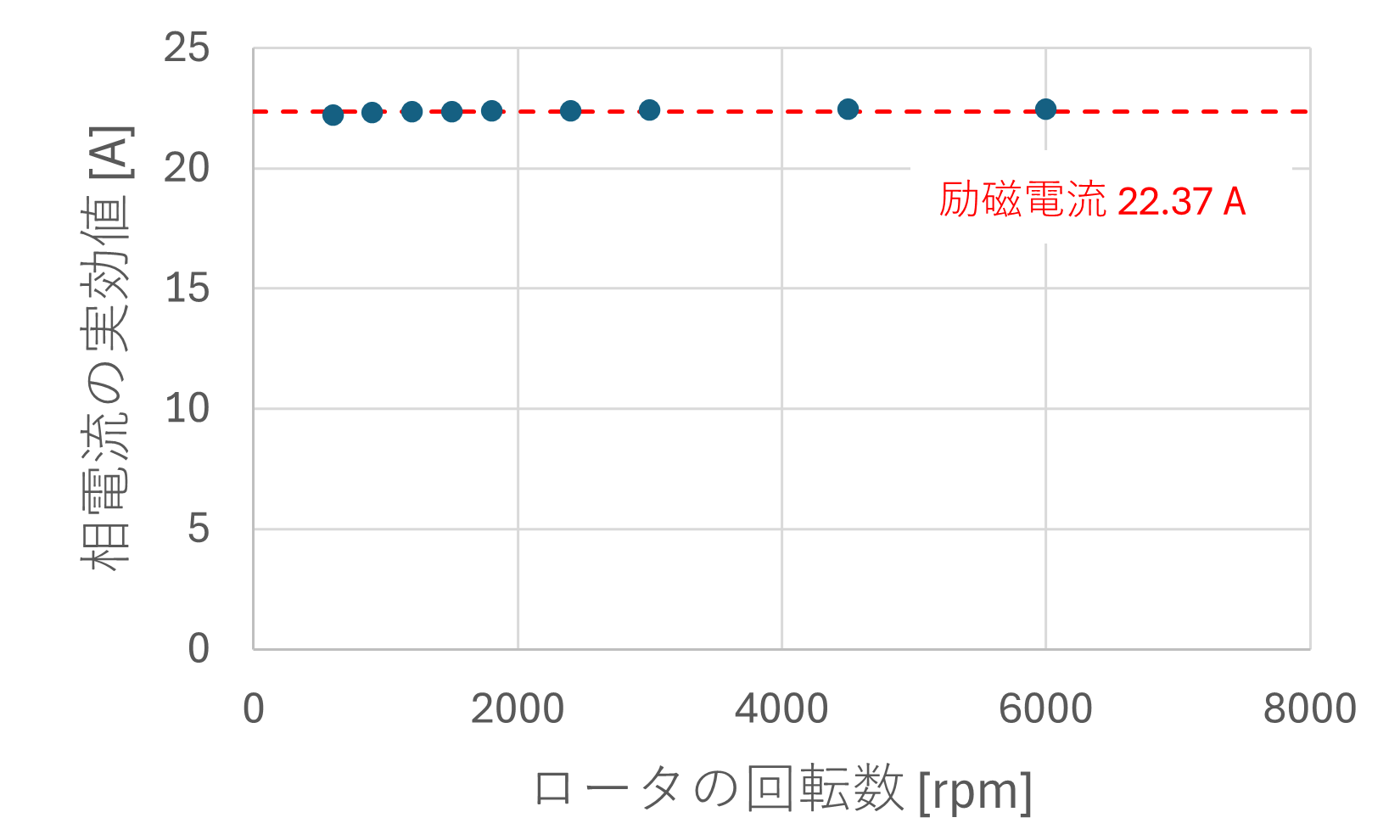
図4:無負荷試験のNI特性
〇すべり―トルク特性、すべり―効率特性(電源電圧200 V、電源周波数200 Hz、同期速度6000 rpm)
.「すべり―トルク特性」を図5に示します。図5の結果から、始動トルクと停動トルクが分かります。電源を入れて始動トルクよりも負荷のトルクが小さいとモータが回り始めます。また、誘導モータにおいては負荷トルクが停動トルクを超えると回転が停止します。
.「すべり―効率特性」を図6に示します。図6の結果から、すべりが0.015~0.025の範囲において効率が最大となることが確認できます。したがって、電圧200 V、周波数200 Hzの電源で本モデルの誘導モータを動作させる場合、当該すべり範囲での運用が最も高効率であると考えられます。
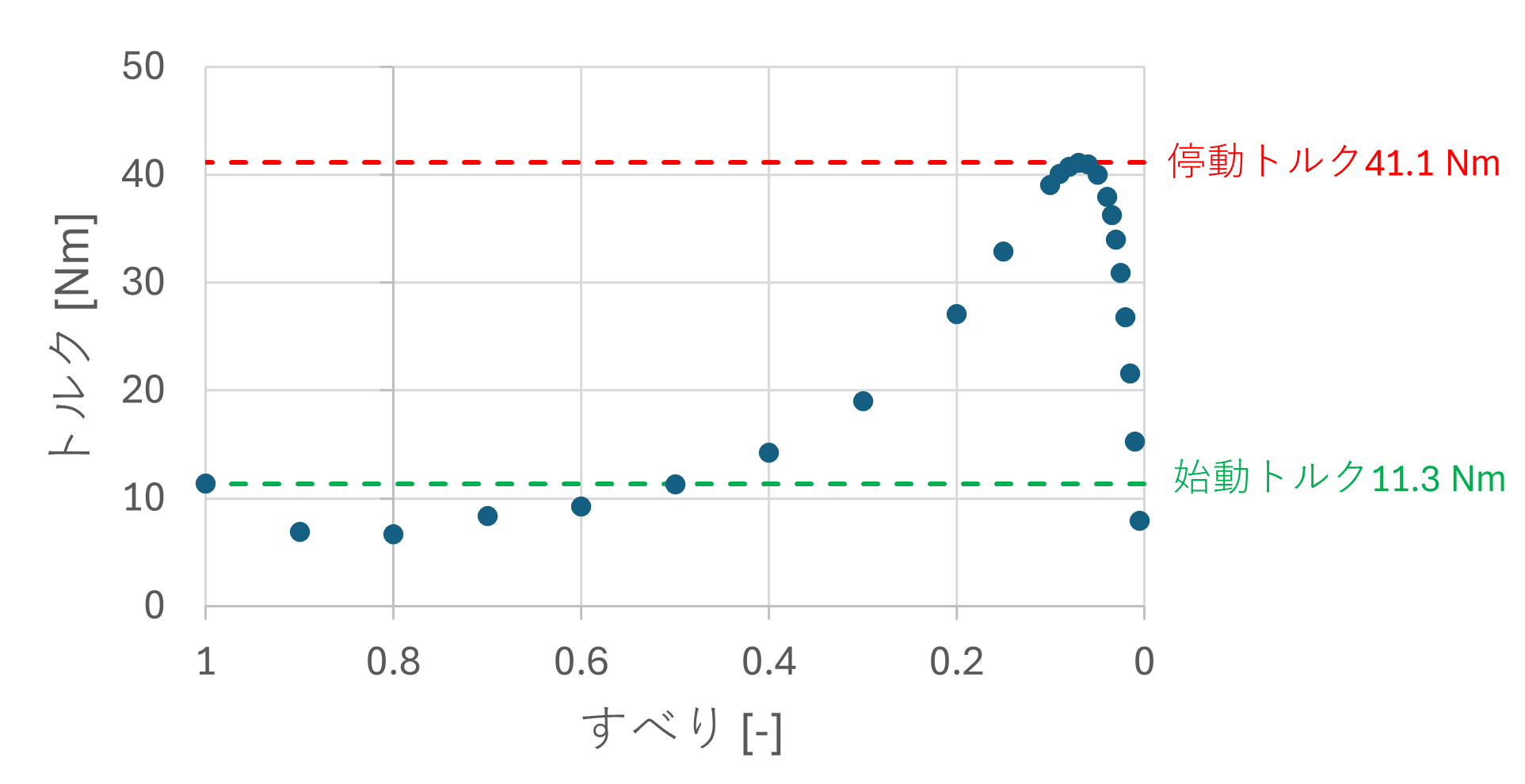 図5:すべり―トルク特性
図5:すべり―トルク特性
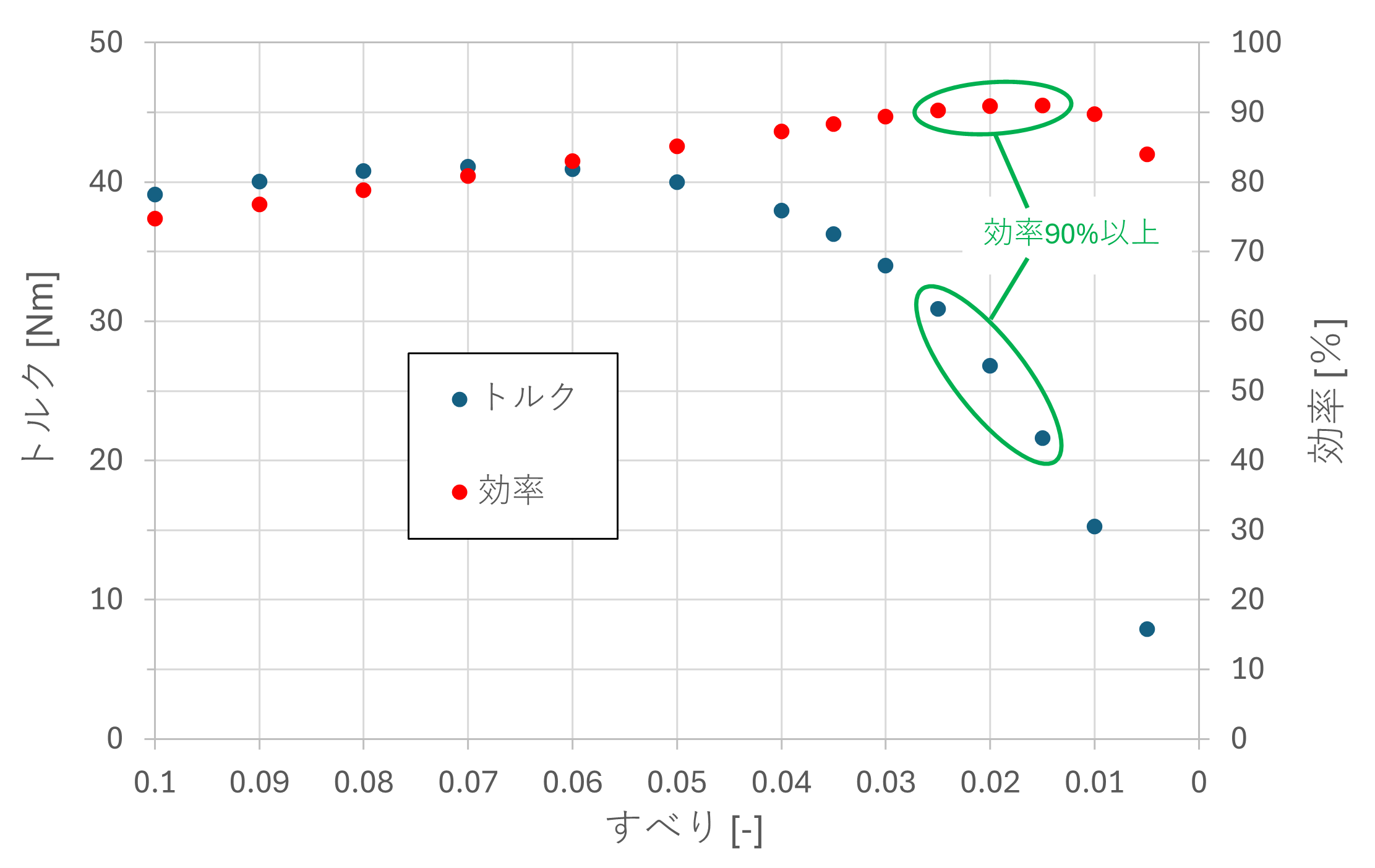
図6:すべり―トルク特性、すべり―効率特性(すべり0.1以下の領域)
〇代表ケース(すべり0.02の時)の計算結果
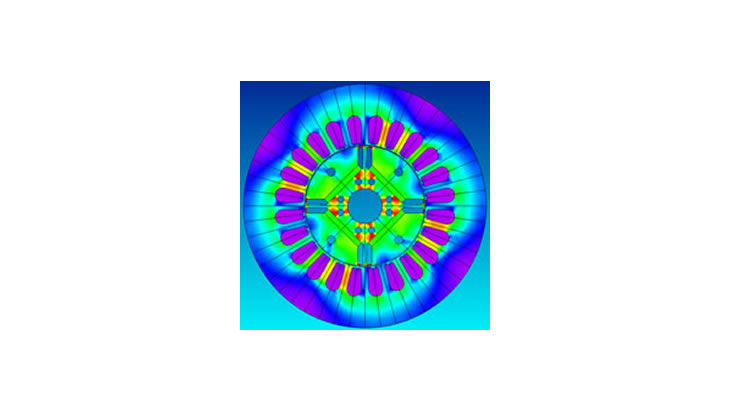
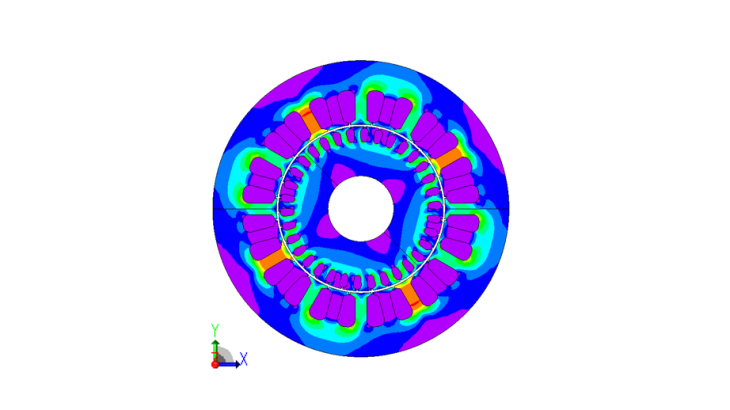
.代表ケース(すべり0.02の時)の計算結果として、トルク波形を図7、U相電流波形を図8、U相電圧波形を図9および磁束密度アニメーションを動画1に示します。
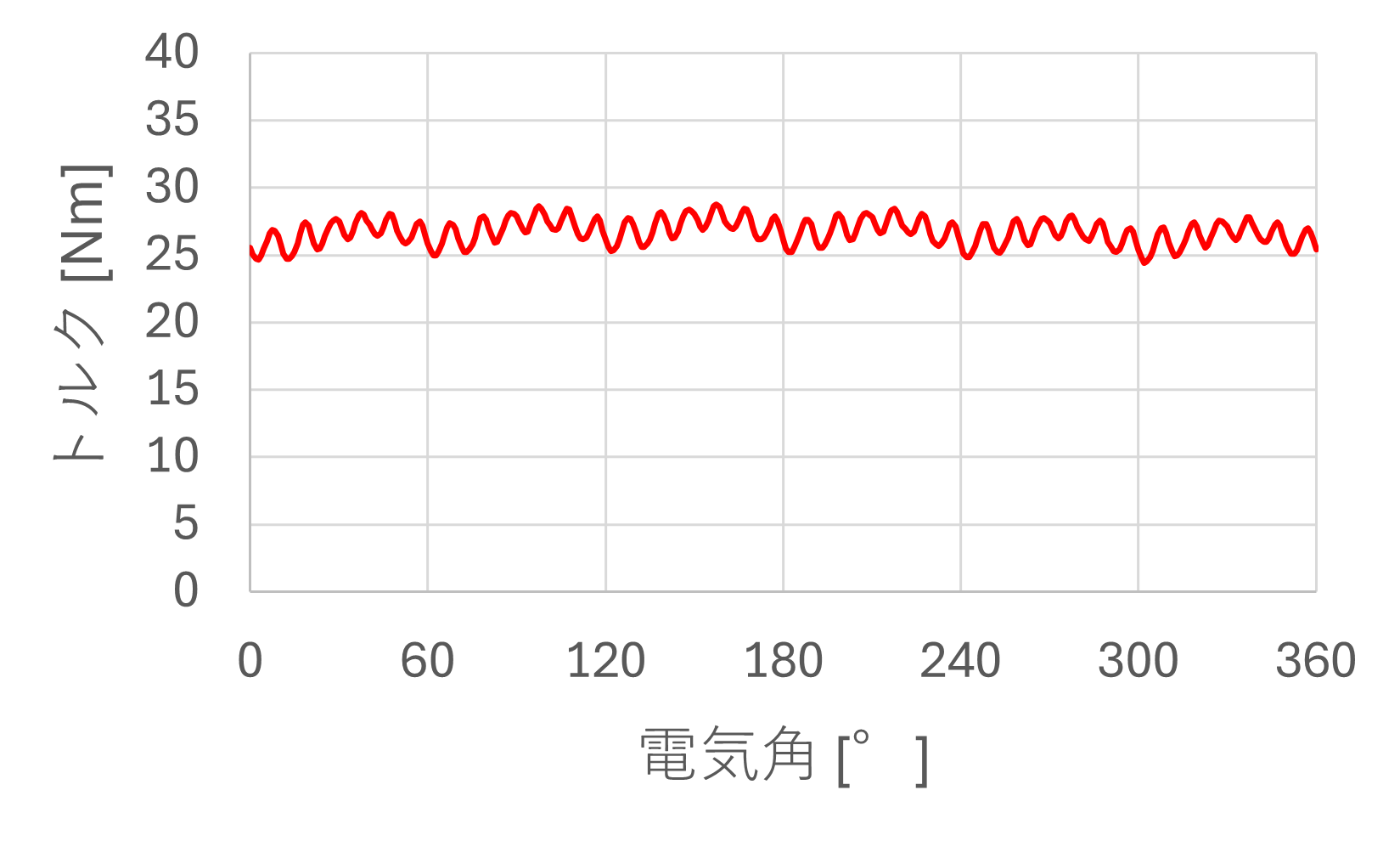 図7:すべり0.02の時のトルク波形
図7:すべり0.02の時のトルク波形
 図8:すべり0.02の時のU相電流波形
図8:すべり0.02の時のU相電流波形
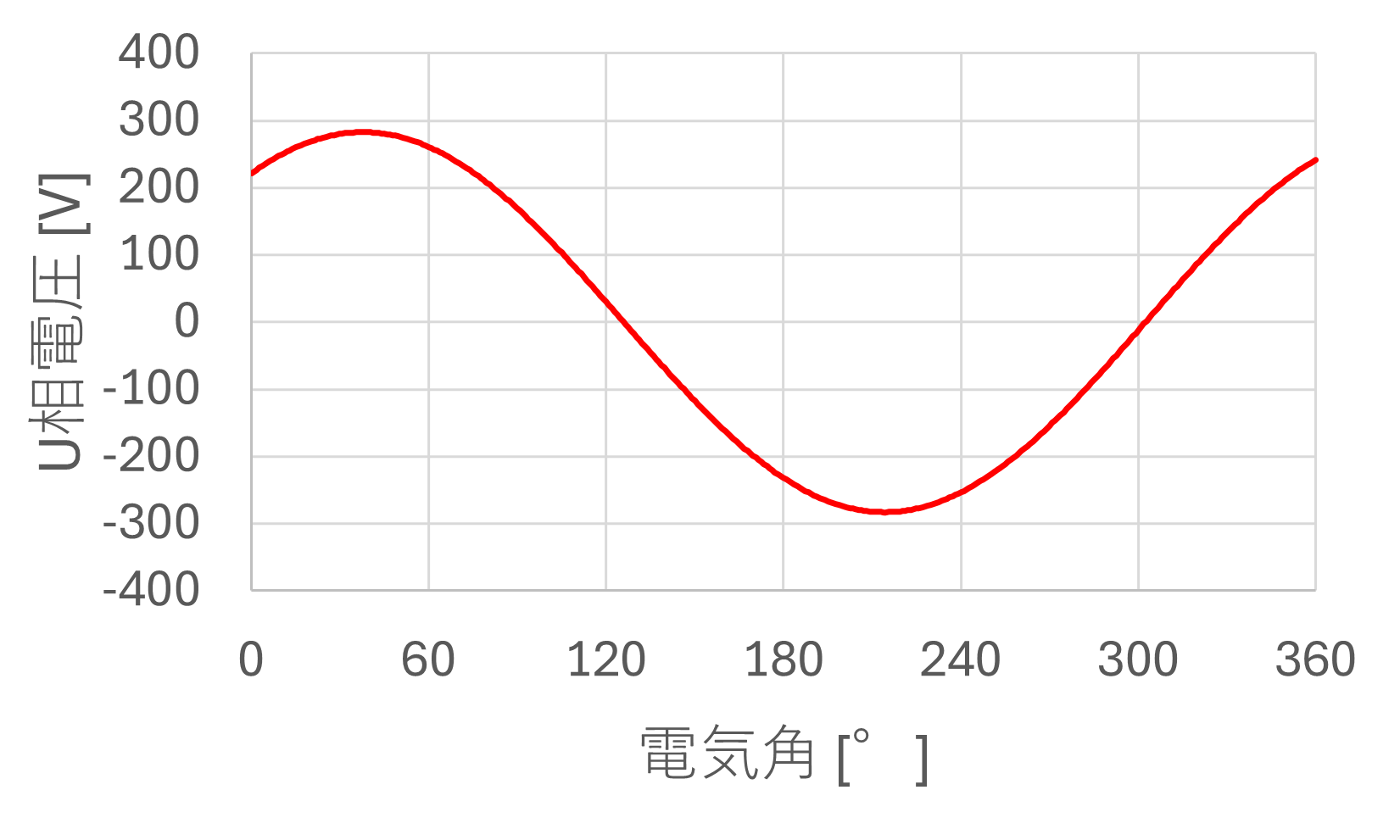 図9:すべり0.02の時のU相電圧波形
図9:すべり0.02の時のU相電圧波形
動画1:すべり0.02の時の磁束密度分布アニメーション