-
製品名
- AnyBody
-
カテゴリー
- 筋骨格解析事例
-
産業分野別
近年、CAEの成熟により製品・構造物のシミュレーション精度は大きく向上し、1D CAEや有限要素法を活用した製品設計においては試作・実験レスが当たり前となっています。しかしその一方で、製品を使用する人間側の使用感や身体への影響評価については、依然として、被験者による実測とMOCAP計測に頼らざるを得ず、多大なコスト・時間・人員を要する状況が続いています。この「製品側と人体側のシミュレーション成熟度のアンバランス」を解消する一つのアプローチとして、本事例では物理エンジンMuJoCoと筋骨格解析ソフトウェアAnyBodyを連携させた人体動作・生体力学解析のワークフローを構築しました。
本事例では、物理シミュレーションと筋骨格解析の連携により、被験者実験に依存することなく、人体への影響を定量的に評価できるワークフローの実現可能性を示しています。
MuJoCo(Multi-Joint dynamics with Contact)は、多関節構造を持つ物体の運動と接触現象を高精度に再現するために開発された汎用物理シミュレーションエンジンです。
ロボット、人体、機械などの関節で接続された構造(多体系)と、床や道具などとの接触・摩擦現象を含めた動力学挙動を数値計算により再現することができます。現在はGoogle DeepMind社によって開発・維持されており、無償のオープンソースソフトウェア(Apache License 2.0)として提供されています。
MuJoCoは、単なるアニメーション生成ツールではなく、物理法則に基づいた運動を高速かつ安定に計算できることを特長としており、ロボティクス、生体力学、機械設計、人工知能など幅広い分野で利用されています。特に、物体同士の接触や摩擦を含む「接触力学」を効率よく解く能力に優れており、複雑な接触を伴う運動の解析に適しています。関節で接続された多体系(リンク機構)と、床など外部環境との接触・摩擦を含む運動を、安定かつ高速に計算できることが特長です。
本事例では、MuJoCoにより、人体の立位姿勢における外乱応答を動力学的に再現しました。本モデルでは、人体を股関節・膝関節・足関節・体幹関節などから構成される多関節リンク系として定義し、足部と支持面との接触および摩擦を含めた運動計算を行っています。足部は、つま先部2点と踵部1点の3点接触構造としてモデル化されており、支持多角形を形成することで、実際の立位に近い接触条件を再現しました。
立位姿勢の維持には、倒立振子モデルの考え方に基づくバランス制御を採用しました。身体重心(CoM:Center of Mass)の位置と支持多角形中心との誤差を算出し、その誤差に応じてPD制御則※ により関節トルクを生成しています。具体的には、足関節を主制御点として姿勢補正トルクを出力し、股関節および体幹関節が補助的に作用する協調制御を構成しました。この制御により、物理的整合性を保ちながら立位姿勢の安定化が実現されました。
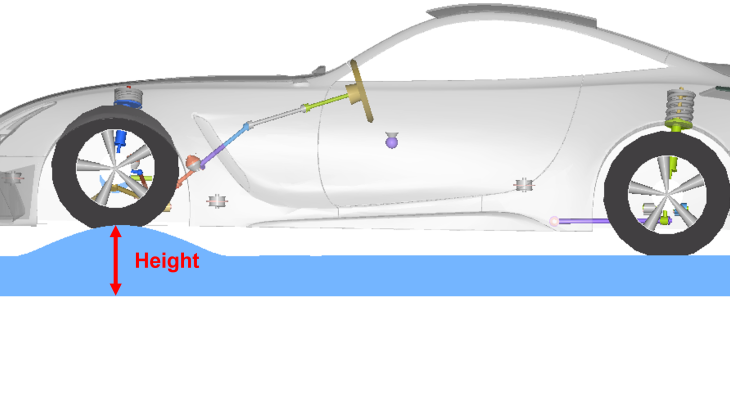
本モデルでは、水平二方向(前後・左右)に移動する加振台を導入し、支持面自体に外乱を与える環境を構築しています。加振台はスライド機構により駆動され、正弦波状の変位入力を与えることで、外乱環境下における姿勢応答を再現しています。この構成により、静的な姿勢のみならず、動的外乱に対する人体のバランス維持挙動を解析することが可能となっています。
※ PD制御とは
PD制御(比例微分制御)とは、目標値と現在値の「偏差(P:Proportional)」と、その偏差の「変化速度(D:Derivative)」の2成分に基づいて制御出力を
決定するフィードバック制御手法です。偏差が大きいほど強い補正力を、偏差の変化速度が大きいほど運動を抑える減衰力を加えることで、応答性と安定性を
両立します。本シミュレーションでは、重心の位置ずれ(偏差)とその変化速度を入力として関節トルクを算出することで、外乱に対する滑らかな姿勢回復を
実現しています。

MuJoCoのシミュレーション結果として、身体各部キーポイント(体幹、骨盤、大腿、下腿、足部、上肢など)の空間座標を一定時間間隔で出力し、これらの時系列データを次段階のAnyBody筋骨格解析に入力することで、筋活動および関節負荷の解析に利用しました。MuJoCo側では足裏3点ポイントの床反力も算出可能ですが、ここでは動作データのみを用い、床反力条件はAnyBodyの反力推定機能を用いました。

このように、MuJoCoによる物理シミュレーションを用いることで、外乱を伴う環境下における人体の運動応答を力学的に整合した形で生成し、筋骨格解析との連携を可能としました。
製品やサービスに関するご相談、導入に関するご質問等お気軽にお問い合わせください。
各種資料をご希望の方は、資料請求フォームよりお申し込みいただけます。