-
製品名
- AnyBody
-
カテゴリー
- 筋骨格解析事例
-
産業分野別

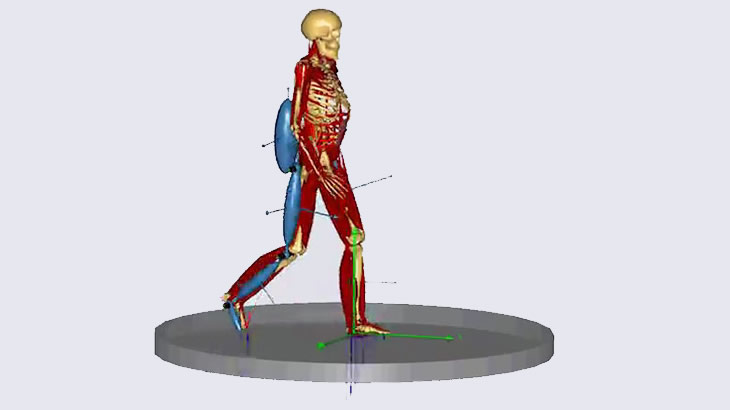
このモデルでは、被験者の歩行動作に応じての床反力がモーションキャプチャーと同時に測定されています。しかし、ロボットを人体モデルに装着すると、人体-ロボットを含むモデルの重量が増えるので、サンプル歩行モデルの床反力値は妥当ではなくなるため、利用できません。
代わりに、"GRFPrediction"というAnyBodyの床反力推定機能を用います。

ロボットは、7セグメントで単純に定義し、12㎏とした質量をそれらのセグメントに分配させます。
また、結合条件として、人体モデルの脚の外転/外旋の動作を拘束しないようにジョイントを定義しました。
股関節 : ボールジョイント
膝 : 回転ジョイント
足首 : ボールジョイント
ロボットの動作は、解析の入力条件としてインプットする必要があるので、人体モデルの歩行動作に従う動作になるように拘束条件を定義します。

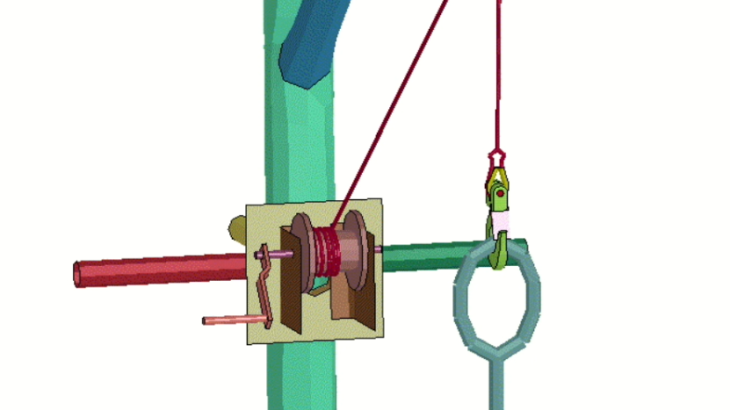
ロボットの作動力として、ロボットのジョイントに、作動トルクを付加します。 トルクを決定するために、一旦出力を無効にしたロボットを人体モデルに装着し、逆動力学解析をおこないます。(図 1)
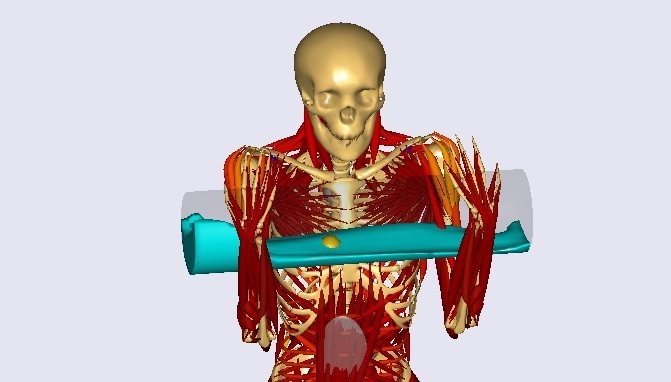
逆動力学解析の解析結果から、ロボットの質量を考慮した場合の人体の関節トルクが得られます。(図 2)
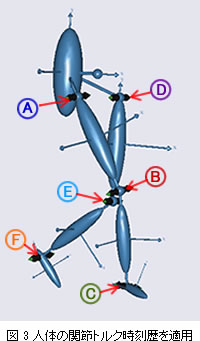
ロボットのジョイントを作動トルクとして、解析した人体の関節トルクの時刻歴を適用します。(図 3)

右のアニメーションは、トルク仕様のロボットを装着した場合の歩行結果となります。
筋肉の活動は、ロボットを利用しない状態ではカラーコンターが腓腹筋の所に見えますが、ロボットを利用すると、腓腹筋のコンターはほとんど変化しないため、筋活動が減少したことが分かります。
図 5は、ロボットによる理想的なサポート状態による解析のはずですが、右脚の筋活動量は完全にゼロになっていないこともわかります。それは、脚関節の外転/外旋の動作を支援していないためです。いくつかの共通な筋は、これらの動作に必要なため、筋活動量は残ります。