-
製品名
- AnyBody
-
カテゴリー
- 筋骨格解析事例
-
産業分野別
-

AnyBodyで利用可能な3つの手モデル
-

マグカップモデルの寸法と慣性特性
-

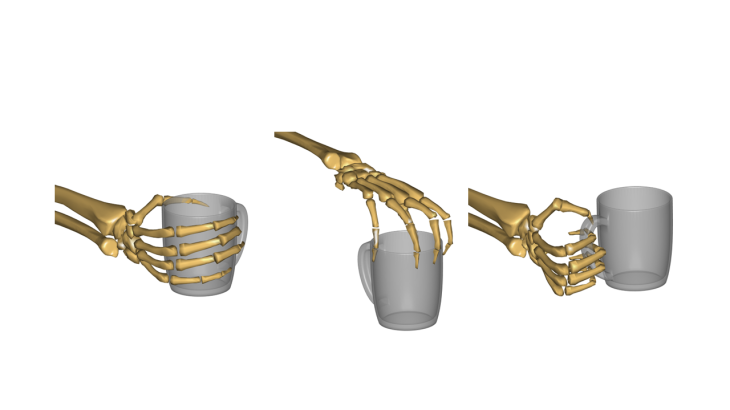
解析対象とした3つのマグカップ把持姿勢
-

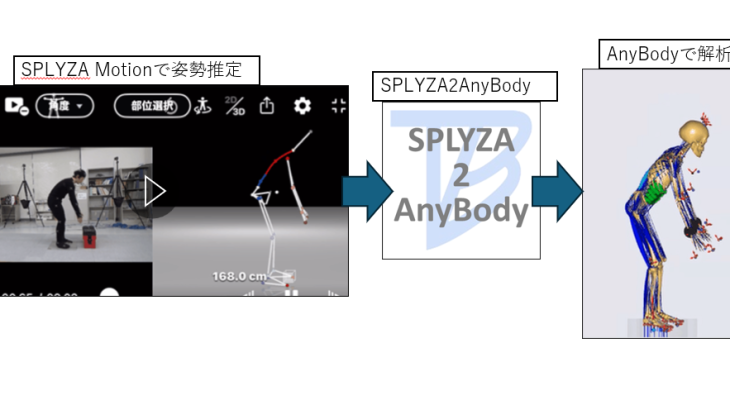
解析フローのイメージ
-

評価対象とした手指部関節
-

マグカップ把持時の手指関節モーメント