概要
筋骨格モデル解析で定量化できる筋・関節の負荷は、自動車設計の人間工学においても重要な意味を持ちます。しかし、車両内で身体運動をMoCapで正確に計測することは難しいため、MoCapで計測した身体動作データに基づいた車両走行時の筋骨格モデル解析は容易ではありません。そこで本事例ではMoCap計測の代替としてマルチボディダイナミクスソフトウェアで生成した身体運動データを用いることで、車両走行時にヒトの筋・関節に生じる負荷を定量化した試みについて紹介します。
解析事例
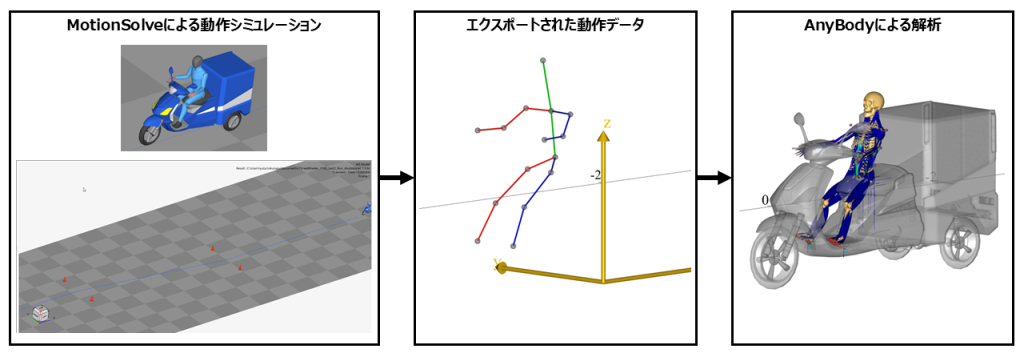
今回の解析の基本的な流れは以下の示すとおりとなります。
1. マルチボディダイナミクスソフトウェアで身体運動を生成
2. 1で生成された身体運動データをエクスポート
3. 2で出力された身体運動データをAnyBodyに取り込み、筋骨格モデル解析を実施
1の過程で使用するマルチボディダイナミクスソフトウェアにはAltair MotionSolveを使用しました。MotionSolveにはVehicle Toolという自動車解析に特化した機能が用意されているおり、このツールを活用することで車両走行時のシミュレーション解析が比較的容易に可能となります。
解析の流れ
MotionSolveでの解析
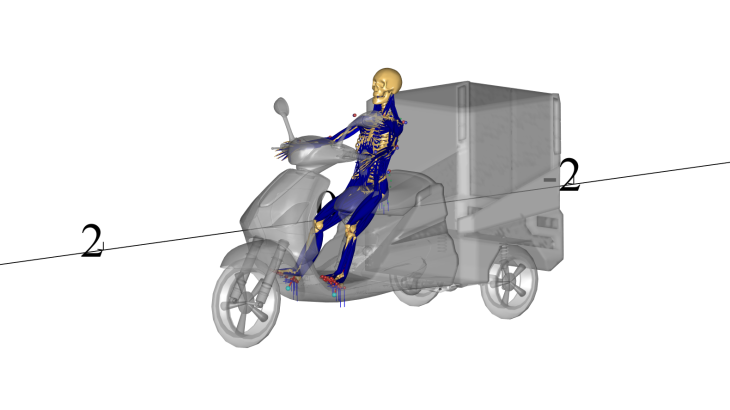
ヒト・車体系はMotionSolveのVehicle Toolで用意されているトライクモデルを使用しました。
Vehicle Toolで用意されているトライクモデル
また、走行条件は以下の2つを設定しました。
条件1:36km/hでの直進走行
条件2:36km/hでのレーンチェンジ
上述の2条件の身体運動データをエクスポートし、AnyBodyでの解析へと移行します。
AnyBodyの解析
MotionSolveからエクスポートした身体運動データを用いて、AnyBodyの筋骨格モデルの姿勢を逆運動学解析によって同定した後に、同定した姿勢を力学的に成立させるために必要な筋肉の張力ならびに筋張力が作用した結果として関節に生じる負荷を逆動力学解析によって算出します。今回は簡単のためにMotionSolveから車両系のデータはエクスポートしなかったため、ヒト・車両間に作用する力(手・臀部・足とトライク間に作用する力)はAnyBodyの反力推定機能を用いて定量化しています。
条件1:36km/hでの直進走行
条件2:36km/hでのレーンチェンジ
解析結果
以下に条件1・2における身体重心速度と腰部に生じる関節負荷を図示します。なお、図には36km/hでの直線走行が可能となった0.5秒以降のデータのみを掲載しています。
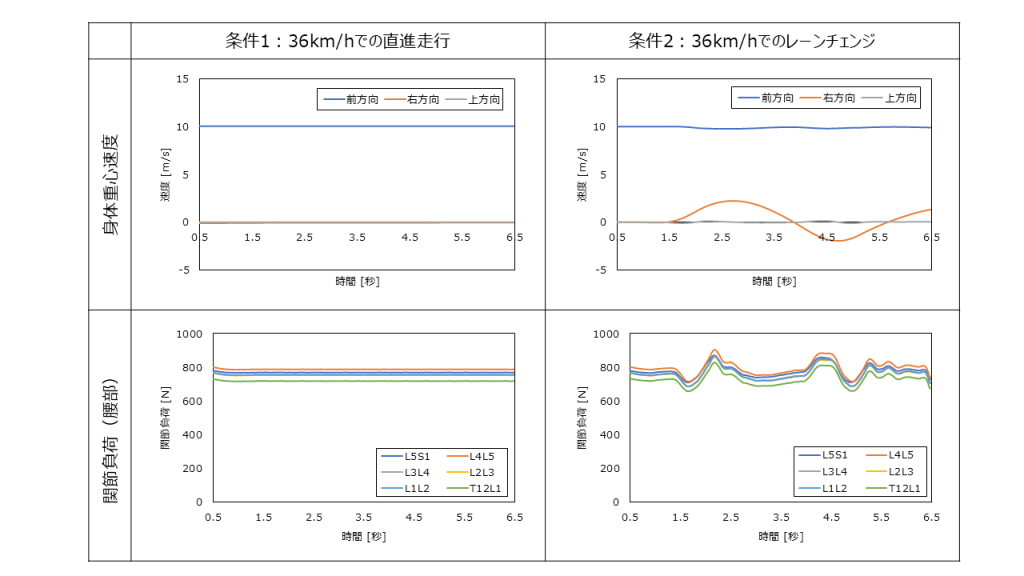
条件1・2における身体重心速度と腰部に生じる関節負荷
条件2では条件1に比較して1.8秒以降の腰部負荷の値が変動していることが確認できると思います。これは、レーンチェンジによって身体に横Gが作用した結果として生じたものだと考えられます。
本解析の限界
MotionSolveで用意されているヒト・車両系モデルは、設定が簡単で使用しやすいですが、現状のモデルでは、実際の車両走行時のヒトの動きを反映するレベルには至っていません(全ての関節が一定角度で固定されているため)。実際の車両走行時のヒトの動きを再現するためには、①受動的・能動的な力発揮要素の追加、②脳が担っている姿勢調整アルゴリズムの実装、などの付加的な要素を導入する必要があります。
以上