-
製品名
- Altair MotionSolve
- Altair AcuSolve
-
カテゴリー
- 熱流体解析事例
-
産業分野別

今回の計算では、HyperWorks内のソルバーである、汎用熱流体解析ソフトAcuSolve及び機構解析ソフトMotionSolveを使用しています。
計測データをもとに、蝶型ロボットはばたき時の動作をMotionSolveを利用した機構計算により再現します。
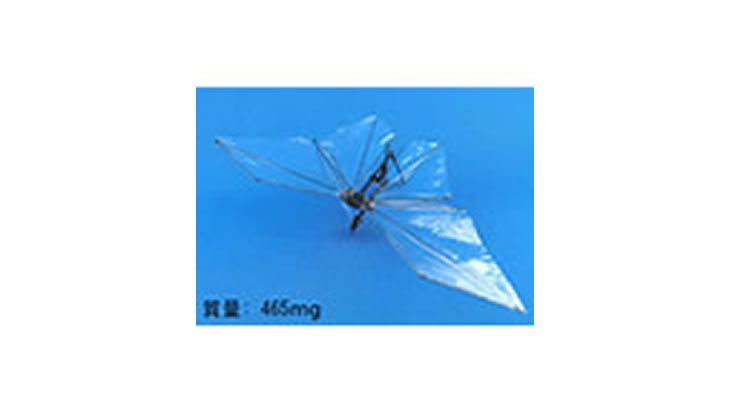
小型はばたきロボットの開発が盛んにおこなわれている。 開発アプローチの1つとして、実際の蝶の動作機構を模倣することがおこなわれている。蝶型ロボットはばたき時の流体解析をおこなうことによって、蝶型ロボットの設計思想を得ることや、実際の蝶の飛行メカニズムを解明することが目的とされている。
※本解析は東京電機大学・藤川様との共同研究になります。


今回の計算では、HyperWorks内のソルバーである、汎用熱流体解析ソフトAcuSolve及び機構解析ソフトMotionSolveを使用しています。
計測データをもとに、蝶型ロボットはばたき時の動作をMotionSolveを利用した機構計算により再現します。
各タイムステップごとにMotionSolveからAcuSolveへ翅及び胴体の位置(速度)を受け渡し、これを利用してAcuSolveで流体計算を行います。(流速・圧力を求めます。)
これを全タイムステップで繰り返すことにより、蝶型ロボットはばたき時の流体計算を行う事ができます。
※今回の計算は、片方向連成(流れによって機構の動作を変化させることがない)ですが、双方向連成(流れによって機構の動作が変化する)ような計算も可能です。
図4.1に計算に使用した、蝶型ロボットの動作時刻歴を示します。
flapping運動は10[Hz]程度の周期運動であり、翅の最大打ち上げ時に80[deg]、最大打ち下ろし時に60[deg]となっています。
body pitch運動はflapping運動と位相誤差が約90[deg]となっています。
(おおむね、flapping角が最大(最小)の時にbody pitch角は最小(最大)となっています。)


MotionSolveのアニメーション
図5.1 MotionSolveによる機構計算
揚力・推進力・モーメント
図5.2.に蝶型ロボットにかかる揚力・抗力・回転モーメントの時刻歴を示します。
なお、今回は1/2対称モデルで計算したため、フルモデルでは各物理量は2倍となります。



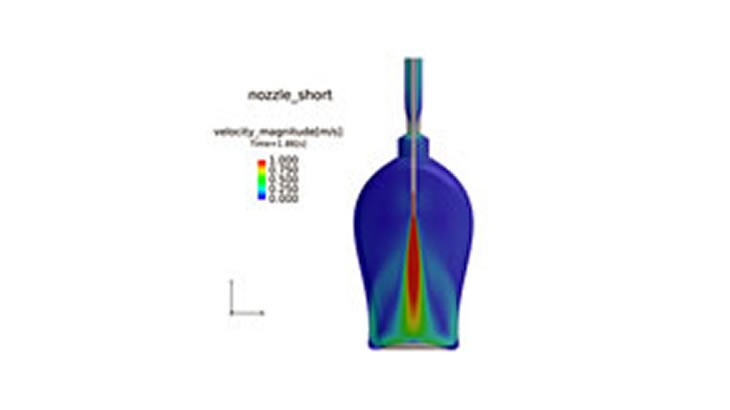
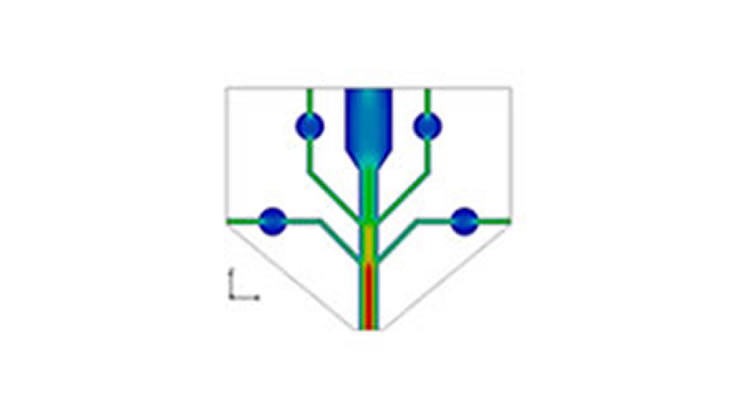
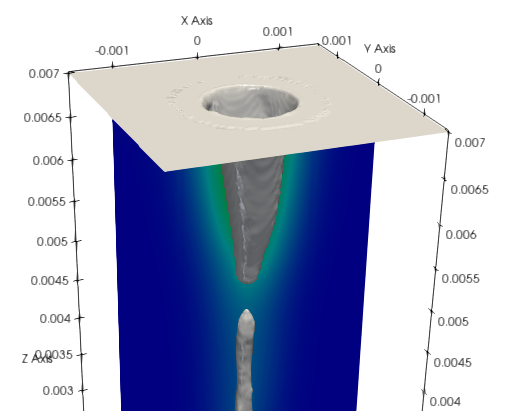
AcuSolveのアニメーション
図5.3 流線アニメーション
製品やサービスに関するご相談、導入に関するご質問等お気軽にお問い合わせください。
各種資料をご希望の方は、資料請求フォームよりお申し込みいただけます。