-
製品名
- AnyBody
-
カテゴリー
- 筋骨格解析事例
-
産業分野別
-

把持対象物体の寸法と慣性特性
-

解析フローのイメージ
-

評価対象とした手指部関節
-

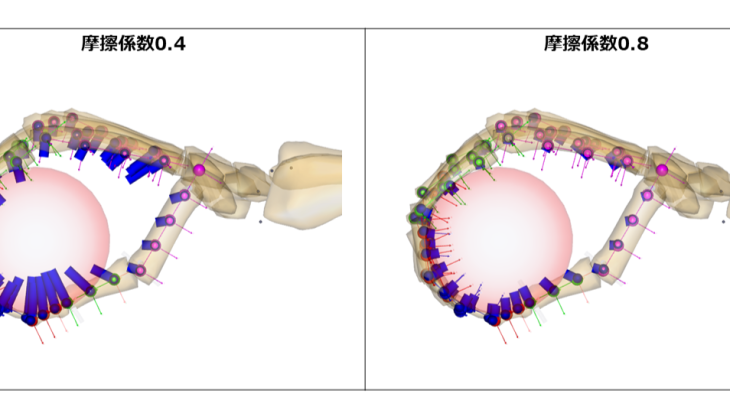
異なる摩擦係数条件での物体把持で手指部に生じる関節モーメント
-

異なる摩擦係数条件間での垂直抗力の比較
我々は様々な物体を把持・操作することで日々の生活を送っています。物体の把持・操作を物理的な観点から考えた場合、把持・操作対象物である物体と、ヒトの手指部の間の摩擦条件は非常に重要な因子となります。AnyBodyには、反力推定機能を応用した静止摩擦力を表現することのできる機能が実装されています。この機能を活用することで様々な摩擦条件の再現と、その状況下における筋骨格系の力学的な反応を定量化することが可能です。
本事例では、AnyBodyに実装されている静止摩擦力を表現できる反力推定機能と、手詳細モデルであるDetailed Hand Modelを併用することで、摩擦条件の異なる状況下における物体把持状態を再現した際に手指部に作用する力学的負荷が、どのように変化するのかを検討しました。
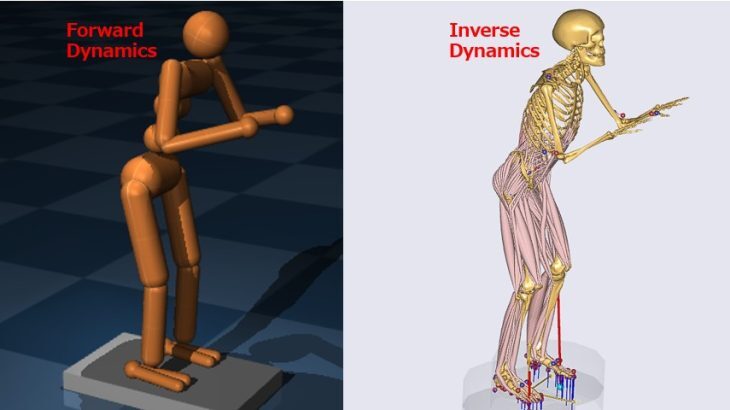
AnyBodyでは、「引くこと」しかできない筋肉の概念を拡張した「押すこと」ができる筋肉(仮想筋)が、身体・外部環境間に存在していると考えることで、身体・外部環境間に作用する反力を筋張力推定アルゴリズムで解く機能が実装されています。この仮想筋を活用することで、様々な身体・外部環境間の関係性をモデリングすることが可能です。具体的な解析事例については、以下のリンク先情報をご参照ください。
この仮想筋は、ほぼ無限に存在する身体・外部環境間反力の作用パターンを1つの状態に収束させるために非常に有益なツールとなりますが、設定によっては現実では起こりえない方向・大きさの力・モーメントが推定されてしまうこともあります。より現実的な力・モーメントの発揮状況を表現できるようにするために、上述の仮想筋の原理を応用した静止摩擦力を表現できるモデルがAnyBodyには用意されています。この静止摩擦力を表現できる反力推定機能は、例えば歩行時の前後左右方向の床反力を推定するために活用されています。
ここからは、AnyBodyに実装されている静止摩擦力を表現できる反力推定機能と、手詳細モデルであるDetailed Hand Modelを併用することで、摩擦条件の異なる状況下における物体把持状態を再現した際に手指部に作用する力学的負荷が、どのように変化するのかを検討した事例を紹介します。
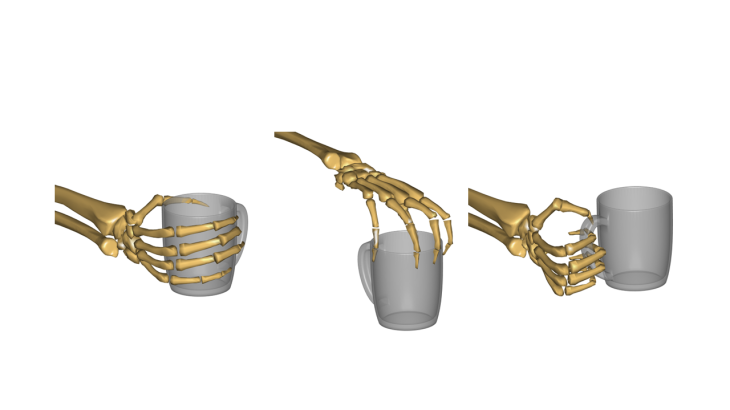
把持対象物体は高さ205 mm、半径30 mm、質量550 gの円柱体としてモデル化しました(おおよそ市販されているペットボトル程度のサイズ・重量となります)。物体の重心は高さ125 mmの位置にあると仮定し、重心周りの慣性モーメントは円柱体の慣性モーメントの公式より算出しました。
Detailed Hand Modelを使用しました。Detailed Hand Modelには、手指部の各関節運動を表現するための31の運動学的自由度と、各運動学的自由度にモーメントを供給するアクチュエーターが搭載されています。このモデルは手指部の運動に関連した筋肉の解析はできませんが、手指部の各関節に生じるモーメントに基づいた単純化した解析によって手指部全体の力学的負荷を俯瞰的に評価することには適しています。
手指部に設定した59か所の接触点に対して、AnyBodyの反力推定機能を応用した静止摩擦モデルを設定しました。この反力推定機能を応用した静止摩擦モデルによって、手指部と把持対象物の間に作用する反力が算出されます。
逆運動学解析によって対象物体を把持した姿勢を規定し、規定した姿勢を成立させるために必要な各手指部関節の関節モーメントおよび手指部・把持対象物体間反力を逆動力学解析で算出しました。今回の事例では、静止摩擦係数0.4、静止摩擦係数0.8の2条件で解析を行いました。
下図に示す、手根中手関節(CMC)、中手指節間関節(MCP)、近位指節間関節(PIP)、遠位指節間関節(DIP),母指指節間関節(IP)に作用する関節モーメントを、静止摩擦係数0.4、静止摩擦係数0.8の2条件間で比較しました。
静止摩擦係数0.4条件では、静止摩擦係数0.8条件に比較して、手指部関節モーメントが高い傾向が確認されました。また、手指部・把持対象物体間反力に作用する垂直抗力は、静止摩擦係数0.4条件で、静止摩擦係数0.8条件に比較して高くなることも確認できました。
CMCは手根中手関節,MCPは中手指節間関節,PIPは近位指節間関節,DIPは遠位指節間関節を表している.
本事例では、AnyBodyに実装されている静止摩擦力を表現できる反力推定機能と、手詳細モデルであるDetailed Hand Modelを組み合わせて使用することによって、摩擦条件の異なる状況下における物体把持状態を再現した解析が可能であることを示しました。この手法を応用することで、製品の把持手部分のグリップ力を高めるために摩擦係数が高くなるように設計された製品を使用した場合や、作業用グローブなどを着用した結果として手指部・物体間の摩擦条件が変化してしまう場合などの状況における手指部に生じる力学的負荷を定量化することが可能となります。
製品やサービスに関するご相談、導入に関するご質問等お気軽にお問い合わせください。
各種資料をご希望の方は、資料請求フォームよりお申し込みいただけます。